 Electronics")
Triple Axis Accelerometer ADXL335


Description: Breakout board for the 3 axis ADXL335 from Analog Devices. This is the latest in a long, proven line of analog sensors - the holy grail of accelerometers. The ADXL335 is a triple axis accelerometer with extremely low noise and power consumption - only 320uA! The sensor has a full sensing range of +/-3g.
There is no on-board regulation, provided power should be between 1.8 and 3.6VDC.
Dimensions: 0.7x0.7"
Hooking it Up:
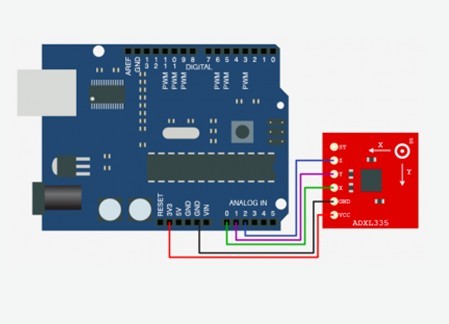
Here is the guide illustrates how to connect an Arduino to the ADXL345 breakout board. The following is a table describing which pins on the Arduino should be connected to the pins on the accelerometer:
| Arduino Pin | ADXL345 Pin |
| 0 | Z |
| 1 | Y |
| 2 | X |
| 3V3 | VCC |
| Gnd |
GND |
Test Code:
//Analog read pins
const int xPin = 0;
const int yPin = 1;
const int zPin = 2;
//The minimum and maximum values that came from
//the accelerometer while standing still
//You very well may need to change these
int minVal =270;
int maxVal =440;
//to hold the caculated values
double x;
double y;
double z;
void setup(){
Serial.begin(9600);
}
void loop(){
//read the analog values from the accelerometer
int xRead = analogRead(xPin);
int yRead = analogRead(yPin);
int zRead = analogRead(zPin);
//convert read values to degrees -90 to 90 - Needed for atan2
int xAng = map(xRead, minVal, maxVal, -90, 90);
int yAng = map(yRead, minVal, maxVal, -90, 90);
int zAng = map(zRead, minVal, maxVal, -90, 90);
//Caculate 360deg values like so: atan2(-yAng, -zAng)
//atan2 outputs the value of -π to π (radians)
//We are then converting the radians to degrees
x = RAD_TO_DEG * (atan2(-yAng, -zAng) + PI);
y = RAD_TO_DEG * (atan2(-xAng, -zAng) + PI);
z = RAD_TO_DEG * (atan2(-yAng, -xAng) + PI);
//Output the caculations
Serial.print("x: ");
Serial.print(x);
Serial.print(" | y: ");
Serial.print(y);
Serial.print(" | z: ");
Serial.println(z);
delay(100);//just here to slow down the serial output - Easier to read
}
Write a review
Your Name:Your Review: Note: HTML is not translated!
Rating: Bad Good
Enter the code in the box below:

